
KoreanFoodie's Study
Solutions to Linear Algebra, Stephen H. Friedberg, Fourth Edition (Chapter 1) 본문
Solution Manuals/Linear Algebra, 4th Edition: Friedberg
Solutions to Linear Algebra, Stephen H. Friedberg, Fourth Edition (Chapter 1)
GoldGiver 2019. 6. 15. 12:48















Solution maual to Linear Algebra, Fourth Edition, Stephen H. Friedberg. (Chapter 1)
Solutions to Linear Algebra, Fourth Edition, Stephen H. Friedberg. (Chapter 1)
Linear Algebra solution manual, Fourth Edition, Stephen H. Friedberg. (Chapter 1)
Linear Algebra solutions Friedberg. (Chapter 1)
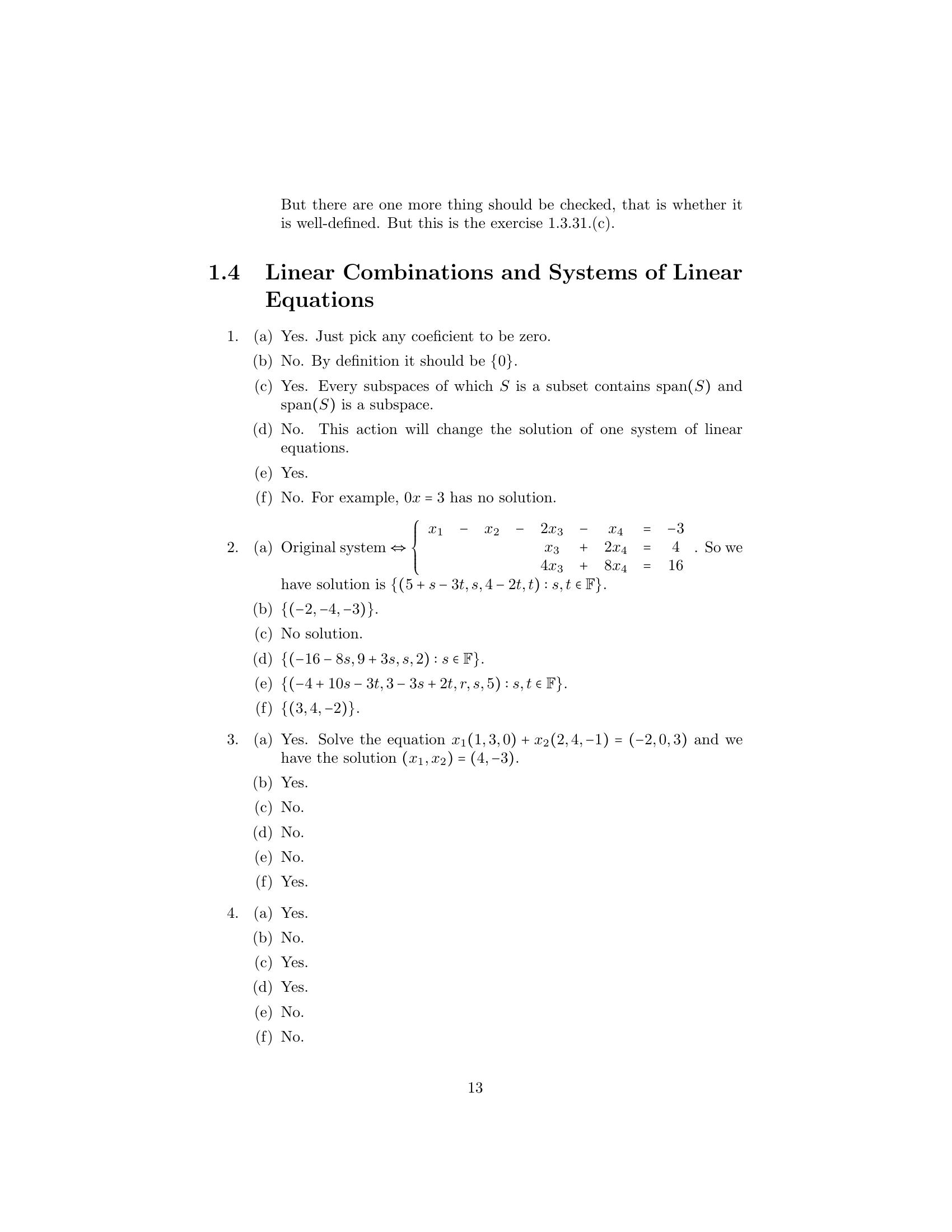
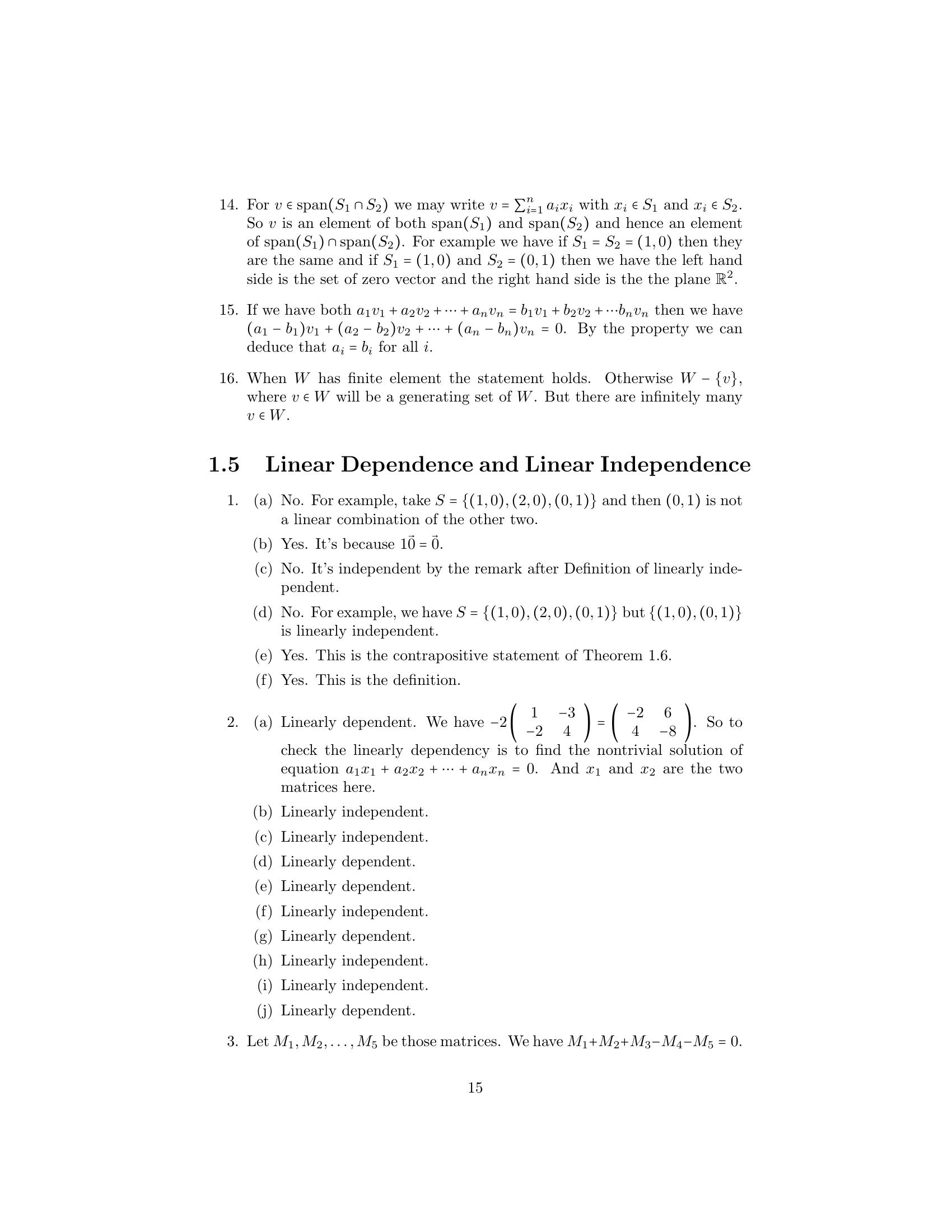
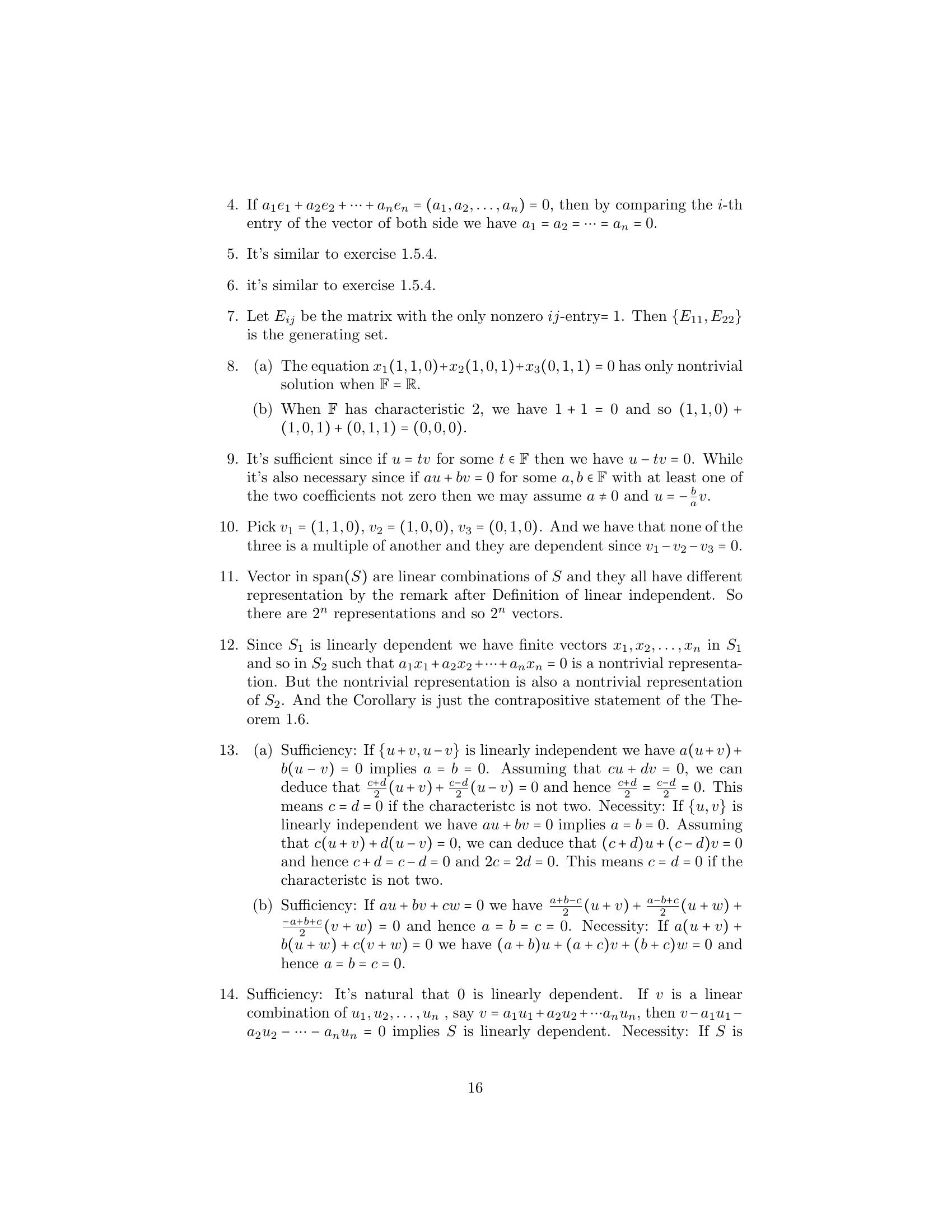
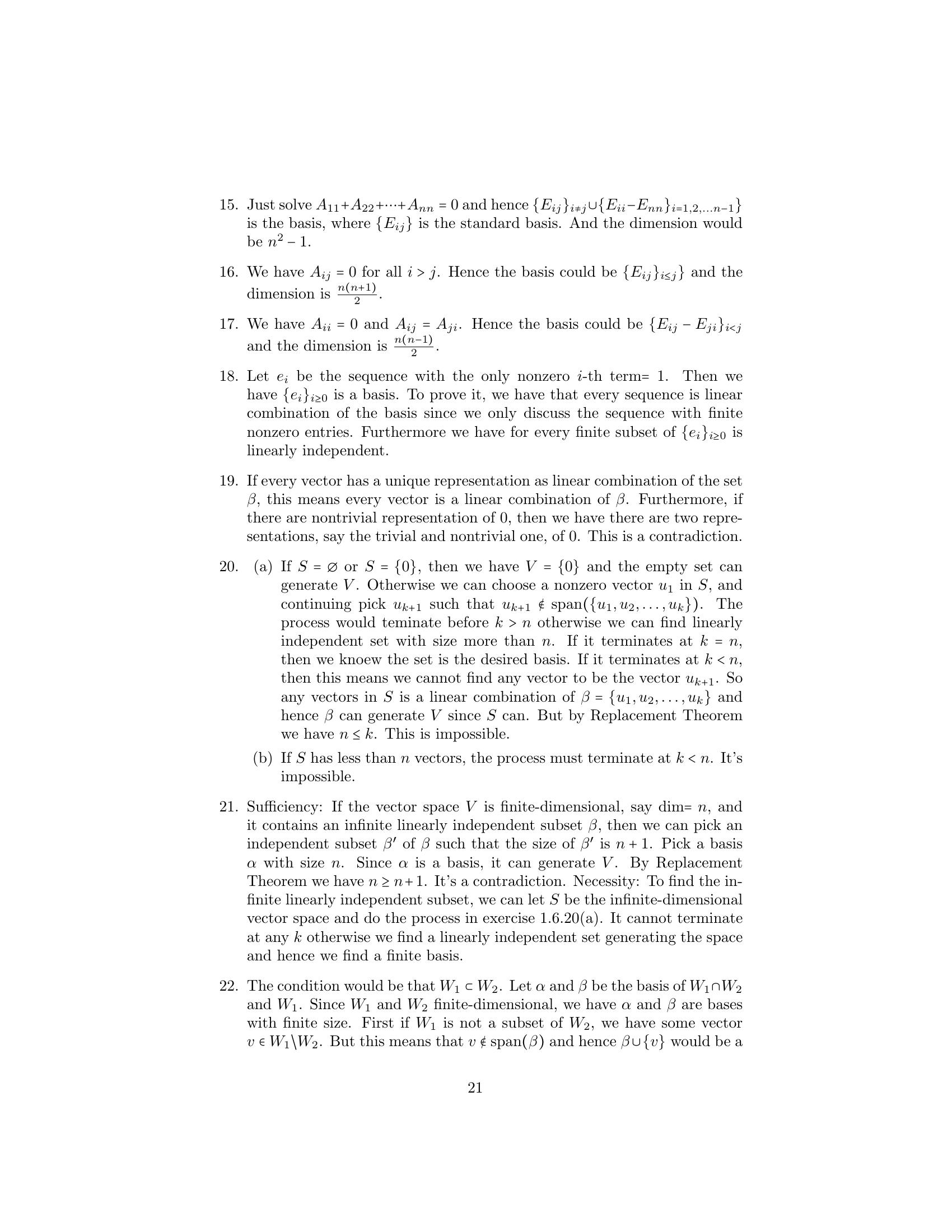
1.EXERCISES Determine whether the vectors emanating from the origin and termi- nating at the following pairs of points are parallel. 6 Chap. 1 Vector Spaces (a) (b) (c) (d) (3, 1, 2) and (6, 4, 2) (−3, 1, 7) and (9, −3, −21) (5, −6, 7) and (−5, 6, −7) (2, 0, −5) and (5, 0, −2) 2.Find the equations of the lines through the following pairs of points in space. (a) (b) (c) (d) (3, −2, 4) and (−5, 7, 1) (2, 4, 0) and (−3, −6, 0) (3, 7, 2) and (3, 7, −8) (−2, −1, 5) and (3, 9, 7) 3.Find the equations of the planes containing the following points in space. (a) (b) (c) (d) (2, −5, −1), (0, 4, 6), and (−3, 7, 1) (3, −6, 7), (−2, 0, −4), and (5, −9, −2) (−8, 2, 0), (1, 3, 0), and (6, −5, 0) (1, 1, 1), (5, 5, 5), and (−6, 4, 2) 4.What are the coordinates of the vector 0 in the Euclidean plane that satisfies property 3 on page 3? Justify your answer. 5.Prove that if the vector x emanates from the origin of the Euclidean plane and terminates at the point with coordinates (a1 , a2 ), then the vector tx that emanates from the origin terminates at the point with coordinates (ta1 , ta2 ). 6.Show that the midpoint of the line segment joining the points (a, b) and (c, d) is ((a + c)/2, (b + d)/2). 7. Prove that the diagonals of a parallelogram bisect each other. 1.Label the following statements as true or false. (a)(b)(c)(d)(e)(f )(g)(h)(i)Every vector space contains a zero vector. A vector space may have more than one zero vector. In any vector space, ax = bx implies that a = b. In any vector space, ax = ay implies that x = y. A vector in Fn may be regarded as a matrix in Mn×1 (F ). An m × n matrix has m columns and n rows. In P(F ), only polynomials of the same degree may be added. If f and g are polynomials of degree n, then f + g is a polynomial of degree n. If f is a polynomial of degree n and c is a nonzero scalar, then cf is a polynomial of degree n. Sec. 1.2 Vector Spaces 13 (j) A nonzero scalar of F may be considered to be a polynomial in P(F ) having degree zero. (k) Two functions in F(S, F ) are equal if and only if they have the same value at each element of S. 2. Write the zero vector of M3×4 (F ). 3. If 1 2 3 M = , 4 5 6 what are M13 , M21 , and M22 ? 4. Perform the indicated operations. 2 5 −3 4 −2 5 (a) + 1 0 7 −5 3 2 ⎛ ⎞ ⎛ ⎞ −6 4 7 −5 (b) ⎝ 3 −2⎠ + ⎝0 −3⎠ 1 8 2 0 2 5 −3 (c) 4 1 0 7 ⎛ ⎞ −6 4 (d) −5 ⎝ 3 −2⎠ 1 8 (e) (2x4 − 7x3 + 4x + 3) + (8x3 + 2x2 − 6x + 7) (f ) (−3x3 + 7x2 + 8x − 6) + (2x3 − 8x + 10) (g) 5(2x7 − 6x4 + 8x2 − 3x) (h) 3(x5 − 2x3 + 4x + 2) Exercises 5 and 6 show why the definitions of matrix addition and scalar multiplication (as defined in Example 2) are the appropriate ones. 5. Richard Gard (“Effects of Beaver on Trout in Sagehen Creek, Cali- fornia,” J. Wildlife Management, 25, 221-242) reports the following number of trout having crossed beaver dams in Sagehen Creek. Upstream Crossings Fall Spring Summer Brook trout 8 3 1 Rainbow trout 3 0 0 Brown trout 3 0 0 14 Downstream Crossings Chap. 1 Vector Spaces Fall Spring Summer Brook trout 9 1 4 Rainbow trout 3 0 0 Brown trout 1 1 0 Record the upstream and downstream crossings in two 3 × 3 matrices, and verify that the sum of these matrices gives the total number of crossings (both upstream and downstream) categorized by trout species and season. 6. At the end of May, a furniture store had the following inventory. Early Mediter- American Spanish ranean Danish Living room suites 4 2 1 3 Bedroom suites 5 1 1 4 Dining room suites 3 1 2 6 Record these data as a 3 × 4 matrix M . To prepare for its June sale, the store decided to double its inventory on each of the items listed in the preceding table. Assuming that none of the present stock is sold until the additional furniture arrives, verify that the inventory on hand after the order is filled is described by the matrix 2M . If the inventory at the end of June is described by the matrix ⎛ ⎞ 5 3 1 2 A = ⎝6 2 1 5⎠ , 1 0 3 3 7.8.9.interpret 2M − A. How many suites were sold during the June sale? Let S = {0, 1} and F = R. In F(S, R), show that f = g and f + g = h, where f (t) = 2t + 1, g(t) = 1 + 4t − 2t2 , and h(t) = 5t + 1. In any vector space V, show that (a + b)(x + y) = ax + ay + bx + by for any x, y ∈ V and any a, b ∈ F . Prove Corollaries 1 and 2 of Theorem 1.1 and Theorem 1.2(c). 10.Let V denote the set of all differentiable real-valued functions defined on the real line. Prove that V is a vector space with the operations of addition and scalar multiplication defined in Example 3. Sec. 1.2 Vector Spaces 15 11.Let V = {0 } consist of a single vector 0 and define 0 + 0 = 0 and c0 = 0 for each scalar c in F . Prove that V is a vector space over F . (V is called the zero vector space.) 12.A real-valued function f defined on the real line is called an even func- tion if f (−t) = f (t) for each real number t. Prove that the set of even functions defined on the real line with the operations of addition and scalar multiplication defined in Example 3 is a vector space. 13.Let V denote the set of ordered pairs of real numbers. If (a1 , a2 ) and (b1 , b2 ) are elements of V and c ∈ R, define (a1 , a2 ) + (b1 , b2 ) = (a1 + b1 , a2 b2 ) and c(a1 , a2 ) = (ca1 , a2 ). Is V a vector space over R with these operations? Justify your answer. 14.Let V = {(a1 , a2 , . . . , an ) : ai ∈ C for i = 1, 2, . . . n}; so V is a vector space over C by Example 1. Is V a vector space over the field of real numbers with the operations of coordinatewise addition and multipli- cation? 15.Let V = {(a1 , a2 , . . . , an) : ai ∈ R for i = 1, 2, . . . n}; so V is a vec- tor space over R by Example 1. Is V a vector space over the field of complex numbers with the operations of coordinatewise addition and multiplication? 16.Let V denote the set of all m × n matrices with real entries; so V is a vector space over R by Example 2. Let F be the field of rational numbers. Is V a vector space over F with the usual definitions of matrix addition and scalar multiplication? 17.Let V = {(a1 , a2 ) : a1 , a2 ∈ F }, where F is a field. Define addition of elements of V coordinatewise, and for c ∈ F and (a1 , a2 ) ∈ V, define c(a1 , a2 ) = (a1 , 0). 18.Is V a vector space over F with these operations? Justify your answer. Let V = {(a1 , a2 ) : a1 , a2 ∈ R}. For (a1 , a2 ), (b1 , b2 ) ∈ V and c ∈ R, define (a1 , a2 ) + (b1 , b2 ) = (a1 + 2b1 , a2 + 3b2 ) and c(a1 , a2 ) = (ca1 , ca2 ). Is V a vector space over R with these operations? Justify your answer. 16 19.20.21.Chap. 1 Vector Spaces Let V = {(a1 , a2 ) : a1 , a2 ∈ R}. Define addition of elements of V coor- dinatewise, and for (a1 , a2 ) in V and c ∈ R, define ⎧ ⎪ ⎨(0, 0) if c = 0 c(a1 , a2 ) = ⎪ ⎩ ca1 , a 2 if c = 0. c Is V a vector space over R with these operations? Justify your answer. Let V be the set of sequences {an } of real numbers. (See Example 5 for the definition of a sequence.) For {an }, {bn } ∈ V and any real number t, define {an } + {bn } = {an + bn } and t{an} = {tan }. Prove that, with these operations, V is a vector space over R. Let V and W be vector spaces over a field F . Let Z = {(v, w) : v ∈ V and w ∈ W}. Prove that Z is a vector space over F with the operations (v1 , w 1 ) + (v2 , w2 ) = (v1 + v2 , w1 + w2 ) and c(v1 , w1 ) = (cv1, cw1 ). 22. How many matrices are there in the vector space Mm×n (Z2 )? (See Appendix C.) 1. Label the following statements as true or false. (a) If V is a vector space and W is a subset of V that is a vector space, then W is a subspace of V. (b) The empty set is a subspace of every vector space. (c) If V is a vector space other than the zero vector space, then V contains a subspace W such that W = V. (d) The intersection of any two subsets of V is a subspace of V. 20 Chap. 1 Vector Spaces (e)(f )(g)An n × n diagonal matrix can never have more than n nonzero entries. The trace of a square matrix is the product of its diagonal entries. Let W be the xy-plane in R3 ; that is, W = {(a1 , a2 , 0) : a1 , a2 ∈ R}. Then W = R2 . 2. Determine the transpose of each of the matrices that follow. In addition, if the matrix is square, compute its trace. −4 2 0 8 −6 (a) (b) 5 −1 3 4 7 ⎛ ⎞ ⎛ ⎞ −3 9 10 0 −8 (c) ⎝ 0 −2⎠ (d) ⎝ 2 −4 3⎠ 6 1 −5 7 6 −2 5 1 4 (e) 1 −1 3 5 (f ) 7 0 1 −6 ⎛ ⎞ ⎛ ⎞ 5 −4 0 6 (g) ⎝6⎠ (h) ⎝ 0 1 −3⎠ 7 6 −3 5 3.4.5.6.Prove that (aA + bB)t = aAt + bB t for any A, B ∈ Mm×n (F ) and any a, b ∈ F . Prove that (At )t = A for each A ∈ Mm×n (F ). Prove that A + At is symmetric for any square matrix A. Prove that tr(aA + bB) = a tr(A) + b tr(B) for any A, B ∈ Mn×n (F ). 7. Prove that diagonal matrices are symmetric matrices. 8.9.Determine whether the following sets are subspaces of R3 under the operations of addition and scalar multiplication defined on R3 . Justify your answers. (a) (b) (c) (d) (e) (f ) W1 = {(a1 , a2 , a3 ) ∈ R3 : a1 = 3a2 and a3 = −a2 } W2 = {(a1 , a2 , a3 ) ∈ R3 : a1 = a3 + 2} W3 = {(a1 , a2 , a3 ) ∈ R3 : 2a1 − 7a2 + a3 = 0} W4 = {(a1 , a2 , a3 ) ∈ R3 : a1 − 4a2 − a3 = 0} W5 = {(a1 , a2 , a3 ) ∈ R3 : a1 + 2a2 − 3a3 = 1} W6 = {(a1 , a2 , a3 ) ∈ R3 : 5a21 − 3a22 + 6a23 = 0} Let W1 , W3 , and W4 be as in Exercise 8. Describe W1 ∩ W3 , W1 ∩ W4 , and W3 ∩ W4 , and observe that each is a subspace of R3 . Sec. 1.3 Subspaces 21 10.11.Prove that W1 = {(a1 , a2 , . . . , an ) ∈ Fn : a1 + a2 + · · · + an = 0} is a subspace of Fn , but W2 = {(a1 , a2 , . . . , an ) ∈ Fn : a1 + a2 + · · · + an = 1} is not. Is the set W = {f (x) ∈ P(F ) : f (x) = 0 or f (x) has degree n} a subspace of P(F ) if n ≥ 1? Justify your answer. 12.13.14.An m×n matrix A is called upper triangular if all entries lying below the diagonal entries are zero, that is, if Aij = 0 whenever i > j. Prove that the upper triangular matrices form a subspace of Mm×n (F ). Let S be a nonempty set and F a field. Prove that for any s0 ∈ S, {f ∈ F(S, F ) : f (s0 ) = 0}, is a subspace of F(S, F ). Let S be a nonempty set and F a field. Let C(S, F ) denote the set of all functions f ∈ F(S, F ) such that f (s) = 0 for all but a finite number of elements of S. Prove that C(S, F ) is a subspace of F(S, F ). 15.Is the set of all differentiable real-valued functions defined on R a sub- space of C(R)? Justify your answer. 16.Let Cn (R) denote the set of all real-valued functions defined on the real line that have a continuous nth derivative. Prove that Cn (R) is a subspace of F(R, R). 17.Prove that a subset W of a vector space V is a subspace of V if and only if W = ∅, and, whenever a ∈ F and x, y ∈ W, then ax ∈ W and x + y ∈ W. 18.Prove that a subset W of a vector space V is a subspace of V if and only if 0 ∈ W and ax + y ∈ W whenever a ∈ F and x, y ∈ W . 19.Let W1 and W2 be subspaces of a vector space V. Prove that W1 ∪ W2 is a subspace of V if and only if W1 ⊆ W2 or W2 ⊆ W1 . 20. † Prove that if W is a subspace of a vector space V and w1 , w2 , . . . , wn are in W, then a1 w1 + a2 w2 + · · · + an wn ∈ W for any scalars a1 , a2 , . . . , an . 21.Show that the set of convergent sequences {an } (i.e., those for which limn→∞ an exists) is a subspace of the vector space V in Exercise 20 of Section 1.2. 22.Let F1 and F2 be fields. A function g ∈ F(F1 , F2 ) is called an even function if g(−t) = g(t) for each t ∈ F1 and is called an odd function if g(−t) = −g(t) for each t ∈ F1 . Prove that the set of all even functions in F(F1 , F2 ) and the set of all odd functions in F(F1 , F2 ) are subspaces of F(F1 , F2 ). † A dagger means that this exercise is essential for a later section. 22 Chap. 1 Vector Spaces The following definitions are used in Exercises 23–30. Definition. If S1 and S2 are nonempty subsets of a vector space V, then the sum of S1 and S2 , denoted S1 + S2 , is the set {x + y : x ∈ S1 and y ∈ S2 }. Definition. A vector space V is called the direct sum of W1 and W2 if W1 and W2 are subspaces of V such that W1 ∩ W2 = {0 } and W1 + W2 = V. We denote that V is the direct sum of W1 and W2 by writing V = W1 ⊕ W2 . 23. Let W1 and W2 be subspaces of a vector space V. (a) Prove that W1 + W2 is a subspace of V that contains both W1 and W2 . (b) Prove that any subspace of V that contains both W1 and W2 must also contain W1 + W2 . 24. Show that Fn is the direct sum of the subspaces W1 = {(a1 , a2 , . . . , an ) ∈ Fn : an = 0} and W2 = {(a1 , a2 , . . . , an ) ∈ Fn : a1 = a2 = · · · = an−1 = 0}. 25.Let W1 denote the set of all polynomials f (x) in P(F ) such that in the representation f (x) = an xn + an−1 xn−1 + · · · + a1 x + a0 , we have ai = 0 whenever i is even. Likewise let W2 denote the set of all polynomials g(x) in P(F ) such that in the representation g(x) = bm xm + bm−1xm−1 + · · · + b1 x + b0 , we have bi = 0 whenever i is odd. Prove that P(F ) = W1 ⊕ W2 . 26.In Mm×n (F ) define W1 = {A ∈ Mm×n(F ) : Aij = 0 whenever i > j} and W2 = {A ∈ Mm×n (F ) : Aij = 0 whenever i ≤ j}. (W1 is the set of all upper triangular matrices defined in Exercise 12.) Show that Mm×n (F ) = W1 ⊕ W2 . 27.Let V denote the vector space consisting of all upper triangular n × n matrices (as defined in Exercise 12), and let W1 denote the subspace of V consisting of all diagonal matrices. Show that V = W1 ⊕ W2 , where W2 = {A ∈ V : Aij = 0 whenever i ≥ j}. Sec. 1.3 Subspaces 23 28.29.A matrix M is called skew-symmetric if M t = −M . Clearly, a skew- symmetric matrix is square. Let F be a field. Prove that the set W1 of all skew-symmetric n × n matrices with entries from F is a subspace of Mn×n (F ). Now assume that F is not of characteristic 2 (see Ap- pendix C), and let W2 be the subspace of Mn×n (F ) consisting of all symmetric n × n matrices. Prove that Mn×n (F ) = W1 ⊕ W 2 . Let F be a field that is not of characteristic 2. Define W1 = {A ∈ Mn×n (F ) : Aij = 0 whenever i ≤ j} and W2 to be the set of all symmetric n × n matrices with entries from F . Both W1 and W2 are subspaces of Mn×n (F ). Prove that Mn×n(F ) = W1 ⊕ W2 . Compare this exercise with Exercise 28. 30.31.Let W1 and W2 be subspaces of a vector space V. Prove that V is the direct sum of W1 and W2 if and only if each vector in V can be uniquely written as x 1 + x 2 , where x1 ∈ W1 and x2 ∈ W2 . Let W be a subspace of a vector space V over a field F . For any v ∈ V the set {v} + W = {v + w : w ∈ W} is called the coset of W containing v. It is customary to denote this coset by v + W rather than {v} + W. (a) Prove that v + W is a subspace of V if and only if v ∈ W. (b) Prove that v1 + W = v2 + W if and only if v1 − v2 ∈ W. Addition and scalar multiplication by scalars of F can be defined in the collection S = {v + W : v ∈ V} of all cosets of W as follows: (v1 + W) + (v2 + W) = (v1 + v2 ) + W for all v1 , v2 ∈ V and a(v + W) = av + W for all v ∈ V and a ∈ F . (c) Prove that the preceding operations are well defined; that is, show that if v1 + W = v1 + W and v2 + W = v2 + W, then (v1 + W) + (v2 + W) = (v1 + W) + (v2 + W) and a(v1 + W) = a(v1 + W) for all a ∈ F . (d) Prove that the set S is a vector space with the operations defined in (c). This vector space is called the quotient space of V modulo W and is denoted by V/W. 1. Label the following statements as true or false. (a)(b)(c)(d)(e)(f )The zero vector is a linear combination of any nonempty set of vectors. The span of ∅ is ∅. If S is a subset of a vector space V, then span(S) equals the inter- section of all subspaces of V that contain S. In solving a system of linear equations, it is permissible to multiply an equation by any constant. In solving a system of linear equations, it is permissible to add any multiple of one equation to another. Every system of linear equations has a solution. Sec. 1.4 Linear Combinations and Systems of Linear Equations 33 2. Solve the following systems of linear equations by the method intro- duced in this section. 2x1 − 2x2 − 3x3 = −2 (a) 3x1 − 3x2 − 2x3 + 5x4 = 7 x1 − x2 − 2x3 − x4 = −3 3x1 − 7x2 + 4x3 = 10 (b) x1 − 2x2 + x3 = 3 2x1 − x2 − 2x3 = 6 x1 + 2x2 − x3 + x4 = 5 (c) x1 + 4x2 − 3x3 − 3x4 = 6 2x1 + 3x2 − x3 + 4x4 = 8 x1 + 2x 2 + 2x3 = 2 (d) x1 + 8x3 + 5x4 = −6 x1 + x 2 + 5x3 + 5x4 = 3 x1 + 2x2 − 4x3 − x4 + x5 = 7 −x1 + 10x3 − 3x4 − 4x5 = −16 (e) 2x1 + 5x2 − 5x3 − 4x4 − x5 = 2 4x1 + 11x2 − 7x3 − 10x4 − 2x5 = 7 x1 + 2x2 + 6x3 = −1 2x1 + x2 + x3 = 8 (f ) 3x1 + x2 − x3 = 15 x1 + 3x2 + 10x3 = −5 3.For each of the following lists of vectors in R3 , determine whether the first vector can be expressed as a linear combination of the other two. (a) (b) (c) (d) (e) (f ) (−2, 0, 3), (1, 3, 0), (2, 4, −1) (1, 2, −3), (−3, 2, 1), (2, −1, −1) (3, 4, 1), (1, −2, 1), (−2, −1, 1) (2, −1, 0), (1, 2, −3), (1, −3, 2) (5, 1, −5), (1, −2, −3), (−2, 3, −4) (−2, 2, 2), (1, 2, −1), (−3, −3, 3) 4.For each list of polynomials in P3 (R), determine whether the first poly- nomial can be expressed as a linear combination of the other two. (a) (b) (c) (d) (e) (f ) x3 − 3x + 5, x3 + 2x2 − x + 1, x3 + 3x2 − 1 4x3 + 2x2 − 6, x3 − 2x2 + 4x + 1, 3x3 − 6x2 + x + 4 −2x3 − 11x2 + 3x + 2, x3 − 2x2 + 3x − 1, 2x3 + x2 + 3x − 2 x3 + x2 + 2x + 13, 2x3 − 3x2 + 4x + 1, x3 − x2 + 2x + 3 x3 − 8x2 + 4x, x3 − 2x2 + 3x − 1, x3 − 2x + 3 6x3 − 3x2 + x + 2, x3 − x2 + 2x + 3, 2x3 − 3x + 1 34 Chap. 1 Vector Spaces 5. In each part, determine whether the given vector is in the span of S. (a) (2, −1, 1), S = {(1, 0, 2), (−1, 1, 1)} (b) (−1, 2, 1), S = {(1, 0, 2), (−1, 1, 1)} (c) (−1, 1, 1, 2), S = {(1, 0, 1, −1), (0, 1, 1, 1)} (d) (2, −1, 1, −3), S = {(1, 0, 1, −1), (0, 1, 1, 1)} (e) −x3 + 2x2 + 3x + 3, S = {x3 + x2 + x + 1, x2 + x + 1, x + 1} (f ) 2x3 − x2 + x + 3, S = {x3 + x2 + x + 1, x2 + x + 1, x + 1} 1 2 1 0 0 1 1 1 (g) , S = , , −3 4 −1 0 0 1 0 0 1 0 1 0 0 1 1 1 (h) , S = , , 0 1 −1 0 0 1 0 0 6.7.8.Show that the vectors (1, 1, 0), (1, 0, 1), and (0, 1, 1) generate F3 . In Fn , let ej denote the vector whose jth coordinate is 1 and whose other coordinates are 0. Prove that {e1 , e2, . . . , en} generates Fn . Show that Pn (F ) is generated by {1, x, . . . , xn }. 9. Show that the matrices 1 0 0 1 0 0 0 0 , , , and 0 0 0 0 1 0 0 1 generate M2×2 (F ). 10. Show that if 1 0 0 0 0 1 M1 = , M2 = , and M3 = , 0 0 0 1 1 0 then the span of {M1 , M2 , M3 } is the set of all symmetric 2×2 matrices. 11. † Prove that span({x}) = {ax : a ∈ F } for any vector x in a vector space. Interpret this result geometrically in R3 . 12.Show that a subset W of a vector space V is a subspace of V if and only if span(W) = W. 13. † Show that if S1 and S2 are subsets of a vector space V such that S1 ⊆ S2 , then span(S1 ) ⊆ span(S2 ). In particular, if S1 ⊆ S2 and span(S1 ) = V, deduce that span(S2 ) = V. 14.Show that if S1 and S2 are arbitrary subsets of a vector space V, then span(S1 ∪S2 ) = span(S1 )+span(S2 ). (The sum of two subsets is defined in the exercises of Section 1.3.) Sec. 1.5 Linear Dependence and Linear Independence 35 15.Let S1 and S2 be subsets of a vector space V. Prove that span(S1 ∩S2 ) ⊆ span(S1 ) ∩ span(S2 ). Give an example in which span(S1 ∩ S2 ) and span(S1 ) ∩ span(S2 ) are equal and one in which they are unequal. 16.Let V be a vector space and S a subset of V with the property that whenever v1 , v2 , . . . , vn ∈ S and a1 v1 + a2 v2 + · · · + an vn = 0 , then a1 = a2 = · · · = an = 0. Prove that every vector in the span of S can be uniquely written as a linear combination of vectors of S. 17.Let W be a subspace of a vector space V. Under what conditions are there only a finite number of distinct subsets S of W such that S gen- erates W? EXERCISES 1. Label the following statements as true or false. (a) If S is a linearly dependent set, then each vector in S is a linear combination of other vectors in S. (b) Any set containing the zero vector is linearly dependent. (c) The empty set is linearly dependent. (d) Subsets of linearly dependent sets are linearly dependent. (e) Subsets of linearly independent sets are linearly independent. (f ) If a1 x1 + a2 x2 + · · · + an xn = 0 and x1 , x2 , . . . , xn are linearly independent, then all the scalars ai are zero. 2. 3 Determine whether the following sets are linearly dependent or linearly independent. 1 −3 −2 6 (a) , in M2×2 (R) −2 4 4 −8 1 −2 −1 1 (b) , in M2×2 (R) −1 4 2 −4 (c) {x3 + 2x2 , −x2 + 3x + 1, x3 − x2 + 2x − 1} in P3 (R) 3The computations in Exercise 2(g), (h), (i), and (j) are tedious unless technology is used. Sec. 1.5 Linear Dependence and Linear Independence 41 (d) {x3 − x, 2x2 + 4, −2x3 + 3x2 + 2x + 6} in P3 (R) (e) {(1, −1, 2), (1, −2, 1), (1, 1, 4)} in R3 (f ) {(1, −1, 2), (2, 0, 1), (−1, 2, −1)} in R3 1 0 0 −1 −1 2 2 1 (g) , , , in M2×2 (R) −2 1 1 1 1 0 −4 4 1 0 0 −1 −1 2 2 1 (h) , , , in M2×2 (R) −2 1 1 1 1 0 2 −2 (i)(j){x4 − x3 + 5x2 − 8x + 6, −x4 + x3 − 5x2 + 5x − 3, x4 + 3x2 − 3x + 5, 2x4 + 3x3 + 4x2 − x + 1, x 3 − x + 2} in P4 (R) {x4 − x3 + 5x2 − 8x + 6, −x4 + x3 − 5x2 + 5x − 3, x4 + 3x2 − 3x + 5, 2x4 + x3 + 4x2 + 8x} in P4 (R) 3. In M2×3 (F ), prove that the set ⎧⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎫ ⎨ 1 1 0 0 0 0 1 0 0 1 ⎬ ⎝0 0⎠ , ⎝1 1⎠ , ⎝0 0⎠ , ⎝1 0⎠ , ⎝0 1⎠ ⎩ ⎭ 0 0 0 0 1 1 1 0 0 1 4.5.6.is linearly dependent. In Fn , let ej denote the vector whose jth coordinate is 1 and whose other coordinates are 0. Prove that {e1 , e2 , · · · , en } is linearly independent. Show that the set {1, x, x2 , . . . , xn } is linearly independent in Pn (F ). In Mm×n (F ), let E ij denote the matrix whose only nonzero entry is 1 in the ith row and jth column. Prove that {E ij : 1 ≤ i ≤ m, 1 ≤ j ≤ n} is linearly independent. 7.Recall from Example 3 in Section 1.3 that the set of diagonal matrices in M2×2 (F ) is a subspace. Find a linearly independent set that generates this subspace. 8. Let S = {(1, 1, 0), (1, 0, 1), (0, 1, 1)} be a subset of the vector space F3 . (a) Prove that if F = R, then S is linearly independent. (b) Prove that if F has characteristic 2, then S is linearly dependent. 9. † Let u and v be distinct vectors in a vector space V. Show that {u, v} is linearly dependent if and only if u or v is a multiple of the other. 10. Give an example of three linearly dependent vectors in R3 such that none of the three is a multiple of another. 42 Chap. 1 Vector Spaces 11.Let S = {u1 , u2 , . . . , un } be a linearly independent subset of a vector space V over the field Z2 . How many vectors are there in span(S)? Justify your answer. 12. Prove Theorem 1.6 and its corollary. 13.Let V be a vector space over a field of characteristic not equal to two. (a) Let u and v be distinct vectors in V. Prove that {u, v} is linearly independent if and only if {u + v, u − v} is linearly independent. (b) Let u, v, and w be distinct vectors in V. Prove that {u, v, w} is linearly independent if and only if {u + v, u + w, v + w} is linearly independent. 14.15.Prove that a set S is linearly dependent if and only if S = {0 } or there exist distinct vectors v, u1 , u2 , . . . , un in S such that v is a linear combination of u1 , u2 , . . . , un . Let S = {u1 , u2 , . . . , un } be a finite set of vectors. Prove that S is linearly dependent if and only if u1 = 0 or uk+1 ∈ span({u1 , u2 , . . . , uk }) for some k (1 ≤ k < n). 16.Prove that a set S of vectors is linearly independent if and only if each finite subset of S is linearly independent. 17.Let M be a square upper triangular matrix (as defined in Exercise 12 of Section 1.3) with nonzero diagonal entries. Prove that the columns of M are linearly independent. 18.19.20.Let S be a set of nonzero polynomials in P(F ) such that no two have the same degree. Prove that S is linearly independent. Prove that if {A1 , A2 , . . . , Ak } is a linearly independent subset of Mn×n (F ), then {At 1 , At 2 , . . . , Atk } is also linearly independent. Let f, g, ∈ F(R, R) be the functions defined by f (t) = ert and g(t) = est , where r = s. Prove that f and g are linearly independent in F(R, R). 1.Label the following statements as true or false. (a) The zero vector space has no basis. (b) Every vector space that is generated by a finite set has a basis. (c) Every vector space has a finite basis. (d) A vector space cannot have more than one basis. 54 Chap. 1 Vector Spaces (e) If a vector space has a finite basis, then the number of vectors in every basis is the same. (f ) The dimension of Pn (F ) is n. (g) The dimension of Mm×n (F ) is m + n. (h) Suppose that V is a finite-dimensional vector space, that S1 is a linearly independent subset of V, and that S2 is a subset of V that generates V. Then S1 cannot contain more vectors than S2 . (i) If S generates the vector space V, then every vector in V can be written as a linear combination of vectors in S in only one way. (j) Every subspace of a finite-dimensional space is finite-dimensional. (k) If V is a vector space having dimension n, then V has exactly one subspace with dimension 0 and exactly one subspace with dimen- sion n. (l) If V is a vector space having dimension n, and if S is a subset of V with n vectors, then S is linearly independent if and only if S spans V. 2. Determine which of the following sets are bases for R3 . (a) (b) (c) (d) (e) {(1, 0, −1), (2, 5, 1), (0, −4, 3)} {(2, −4, 1), (0, 3, −1), (6, 0, −1)} {(1, 2, −1), (1, 0, 2), (2, 1, 1)} {(−1, 3, 1), (2, −4, −3), (−3, 8, 2)} {(1, −3, −2), (−3, 1, 3), (−2, −10, −2)} 3.Determine which of the following sets are bases for P2 (R). (a) (b) (c) (d) (e) {−1 − x + 2x2 , 2 + x − 2x2 , 1 − 2x + 4x2 } {1 + 2x + x2, 3 + x2 , x + x2 } {1 − 2x − 2x2 , −2 + 3x − x 2 , 1 − x + 6x2 } {−1 + 2x + 4x2 , 3 − 4x − 10x2 , −2 − 5x − 6x2 } {1 + 2x − x2, 4 − 2x + x2 , −1 + 18x − 9x2 } 4.Do the polynomials x3 −2x2 +1, 4x2 −x+3, and 3x−2 generate P3 (R)? Justify your answer. 5.Is {(1, 4, −6), (1, 5, 8), (2, 1, 1), (0, 1, 0)} a linearly independent subset of R3 ? Justify your answer. 6. Give three different bases for F2 and for M2×2 (F ). 7.The vectors u1 = (2, −3, 1), u2 = (1, 4, −2), u3 = (−8, 12, −4), u4 = (1, 37, −17), and u5 = (−3, −5, 8) generate R3. Find a subset of the set {u1 , u2 , u3, u4 , u5 } that is a basis for R3 . Sec.8.1.6 9.10.11.12.13.14.Bases and Dimension 55 Let W denote the subspace of R5 consisting of all the vectors having coordinates that sum to zero. The vectors u1 = (2, −3, 4, −5, 2), u2 = (−6, 9, −12, 15, −6), u3 = (3, −2, 7, −9, 1), u4 = (2, −8, 2, −2, 6), u5 = (−1, 1, 2, 1, −3), u6 = (0, −3, −18, 9, 12), u7 = (1, 0, −2, 3, −2), u8 = (2, −1, 1, −9, 7) generate W. Find a subset of the set {u1 , u2 , . . . , u8 } that is a basis for W. The vectors u1 = (1, 1, 1, 1), u2 = (0, 1, 1, 1), u3 = (0, 0, 1, 1), and u4 = (0, 0, 0, 1) form a basis for F4 . Find the unique representation of an arbitrary vector (a1 , a2 , a3 , a4 ) in F4 as a linear combination of u1 , u2 , u3 , and u4 . In each part, use the Lagrange interpolation formula to construct the polynomial of smallest degree whose graph contains the following points. (a) (−2, −6), (−1, 5), (1, 3) (b) (−4, 24), (1, 9), (3, 3) (c) (−2, 3), (−1, −6), (1, 0), (3, −2) (d) (−3, −30), (−2, 7), (0, 15), (1, 10) Let u and v be distinct vectors of a vector space V. Show that if {u, v} is a basis for V and a and b are nonzero scalars, then both {u + v, au} and {au, bv} are also bases for V. Let u, v, and w be distinct vectors of a vector space V. Show that if {u, v, w} is a basis for V, then {u + v + w, v + w, w} is also a basis for V. The set of solutions to the system of linear equations x1 − 2x2 + x3 = 0 2x1 − 3x2 + x3 = 0 is a subspace of R3 . Find a basis for this subspace. Find bases for the following subspaces of F5 : W1 = {(a1 , a2 , a3 , a4 , a5 ) ∈ F5 : a1 − a3 − a4 = 0} and W2 = {(a1 , a2 , a 3 , a4 , a5 ) ∈ F5 : a2 = a3 = a4 and a1 + a5 = 0}. What are the dimensions of W1 and W2 ? 56 Chap. 1 Vector Spaces 15.The set of all n × n matrices having trace equal to zero is a subspace W of Mn×n (F ) (see Example 4 of Section 1.3). Find a basis for W. What is the dimension of W? 16. The set of all upper triangular n × n matrices is a subspace W of Mn×n (F ) (see Exercise 12 of Section 1.3). Find a basis for W. What is the dimension of W? 17. The set of all skew-symmetric n × n matrices is a subspace W of Mn×n (F ) (see Exercise 28 of Section 1.3). Find a basis for W. What is the dimension of W? 18.Find a basis for the vector space in Example 5 of Section 1.2. Justify your answer. 19. Complete the proof of Theorem 1.8. 20. † Let V be a vector space having dimension n, and let S be a subset of V that generates V. (a) Prove that there is a subset of S that is a basis for V. (Be careful not to assume that S is finite.) (b) Prove that S contains at least n vectors. 21.Prove that a vector space is infinite-dimensional if and only if it contains an infinite linearly independent subset. 22.Let W1 and W2 be subspaces of a finite-dimensional vector space V. Determine necessary and sufficient conditions on W1 and W2 so that dim(W1 ∩ W2 ) = dim(W1 ). 23.Let v1 , v2 , . . . , vk , v be vectors in a vector space V, and define W1 = span({v1 , v2 , . . . , vk }), and W2 = span({v1 , v2, . . . , vk , v}). (a)(b)Find necessary and sufficient conditions on v such that dim(W1 ) = dim(W2 ). State and prove a relationship involving dim(W1 ) and dim(W2 ) in the case that dim(W1 ) = dim(W2 ). 24.Let f (x) be a polynomial of degree n in Pn(R). Prove that for any g(x) ∈ Pn (R) there exist scalars c0 , c1 , . . . , cn such that g(x) = c0 f (x) + c1 f (x) + c2 f (x) + · · · + cn f (n) (x), where f (n) (x) denotes the nth derivative of f (x). 25. Let V, W, and Z be as in Exercise 21 of Section 1.2. If V and W are vector spaces over F of dimensions m and n, determine the dimension of Z. Sec. 1.6 Bases and Dimension 57 26.For a fixed a ∈ R, determine the dimension of the subspace of Pn (R) defined by {f ∈ Pn (R) : f (a) = 0}. 27.Let W1 and W2 be the subspaces of P(F ) defined in Exercise 25 in Section 1.3. Determine the dimensions of the subspaces W1 ∩ Pn (F ) and W2 ∩ Pn (F ). 28.Let V be a finite-dimensional vector space over C with dimension n. Prove that if V is now regarded as a vector space over R, then dim V = 2n. (See Examples 11 and 12.) Exercises 29–34 require knowledge of the sum and direct sum of subspaces, as defined in the exercises of Section 1.3. 29.(a)(b)Prove that if W1 and W2 are finite-dimensional subspaces of a vector space V, then the subspace W1 + W2 is finite-dimensional, and dim(W1 + W2 ) = dim(W1) + dim(W2 ) − dim(W1 ∩ W2 ). Hint: Start with a basis {u1 , u2 , . . . , uk } for W1 ∩ W2 and extend this set to a basis {u1 , u2 , . . . , uk , v1 , v2 , . . . vm } for W 1 and to a basis {u1 , u2 , . . . , uk , w1 , w2 , . . . wp } for W2 . Let W1 and W2 be finite-dimensional subspaces of a vector space V, and let V = W1 + W2 . Deduce that V is the direct sum of W1 and W2 if and only if dim(V) = dim(W1 ) + dim(W2 ). 30. Let V = M2×2(F ), W1= a c b a ∈ V : a, b, c ∈ F , and W2= 0−aa b ∈ V : a, b ∈ F . Prove that W1 and W2 are subspaces of V, and find the dimensions of W1 , W2 , W1 + W2 , and W1 ∩ W2 . 31.Let W1 and W2 be subspaces of a vector space V having dimensions m and n, respectively, where m ≥ n. (a) Prove that dim(W1 ∩ W2 ) ≤ n. (b) Prove that dim(W1 + W2 ) ≤ m + n. 32.(a)(b)Find an example of subspaces W1 and W2 of R3 with dimensions m and n, where m > n > 0, such that dim(W1 ∩ W2 ) = n. Find an example of subspaces W1 and W2 of R3 with dimensions m and n, where m > n > 0, such that dim(W1 + W2 ) = m + n. 58 Chap. 1 Vector Spaces (c)Find an example of subspaces W1 and W2 of R3 with dimensions m and n, where m ≥ n, such that both dim(W1 ∩ W2 ) < n and dim(W1 + W2 ) < m + n. 33.(a)(b)Let W1 and W2 be subspaces of a vector space V such that V = W1 ⊕W2 . If β1 and β2 are bases for W1 and W2 , respectively, show that β1 ∩ β2 = ∅ and β1 ∪ β2 is a basis for V. Conversely, let β1 and β2 be disjoint bases for subspaces W1 and W2 , respectively, of a vector space V. Prove that if β1 ∪ β2 is a basis for V, then V = W1 ⊕ W2 . 34. (a) Prove that if W1 is any subspace of a finite-dimensional vector space V, then there exists a subspace W2 of V such that V = W1 ⊕ W2 . (b) Let V = R2 and W1 = {(a1 , 0) : a1 ∈ R}. Give examples of two different subspaces W2 and W2 such that V = W1 ⊕ W2 and V = W1 ⊕ W2 . The following exercise requires familiarity with Exercise 31 of Section 1.3. 35.Let W be a subspace of a finite-dimensional vector space V, and consider the basis {u1 , u2 , . . . , uk } for W. Let {u1 , u2 , . . . , uk , uk+1 , . . . , un } be an extension of this basis to a basis for V. (a)(b)Prove that {uk+1 + W, uk+2 + W, . . . , un + W} is a basis for V/W. Derive a formula relating dim(V), dim(W), and dim(V/W). 1. Label the following statements as true or false. (a) Every family of sets contains a maximal element. (b) Every chain contains a maximal element. (c) If a family of sets has a maximal element, then that maximal element is unique. (d) If a chain of sets has a maximal element, then that maximal ele- ment is unique. (e) A basis for a vector space is a maximal linearly independent subset of that vector space. (f ) A maximal linearly independent subset of a vector space is a basis for that vector space. 2. Show that the set of convergent sequences is an infinite-dimensional subspace of the vector space of all sequences of real numbers. (See Exercise 21 in Section 1.3.) 3. Let V be the set of real numbers regarded as a vector space over the field of rational numbers. Prove that V is infinite-dimensional. Hint: 62 Chap. 1 Vector Spaces Use the fact that π is transcendental, that is, π is not a zero of any polynomial with rational coefficients. 4.Let W be a subspace of a (not necessarily finite-dimensional) vector space V. Prove that any basis for W is a subset of a basis for V. 5.Prove the following infinite-dimensional version of Theorem 1.8 (p. 43): Let β be a subset of an infinite-dimensional vector space V. Then β is a basis for V if and only if for each nonzero vector v in V, there exist unique vectors u1 , u2 , . . . , un in β and unique nonzero scalars c1 , c2 , . . . , cn such that v = c1 u1 + c2 u2 + · · · + cn un . 6.Prove the following generalization of Theorem 1.9 (p. 44): Let S1 and S2 be subsets of a vector space V such that S1 ⊆ S2 . If S1 is linearly independent and S2 generates V, then there exists a basis β for V such that S1 ⊆ β ⊆ S2 . Hint: Apply the maximal principle to the family of all linearly independent subsets of S2 that contain S1 , and proceed as in the proof of Theorem 1.13. 7. Prove the following generalization of the replacement theorem. Let β be a basis for a vector space V, and let S be a linearly independent subset of V. There exists a subset S1 of β such that S ∪ S1 is a basis for V.
'Solution Manuals > Linear Algebra, 4th Edition: Friedberg' 카테고리의 다른 글
'Solution Manuals/Linear Algebra, 4th Edition: Friedberg' Related Articles
more




Comments